제가 HTML에 좀 약해서요 ㅠㅠ
글올리는데 도와주신분들 감사합니다.
2009년 논문을 위해 허접한 휴머노이드를 하나 제작했습니다.
정말 도와주신 많은 분들께 감사를 올리는 바입니다.
논문에 사용된 자재 목록입니다.
(FALINUX) EZ-X5 : Cam 연결 및 영상 처리를 위하여 준비했습니다. pxa255 MCU가 예상 이상으로 성능을 발휘해 주네요..
(NewTC) AB-M128-B : 서보모터 및 DC모터 구동을 위한 atmega128 MCU 탑재 보드입니다.
(NewTC) AM-DC2-2D: DC모터 구동 드라이버 입니다. 제작을 시도하였으나 결국에는 구입 해버렸습니다. ㅠㅠ
(NewTC) AM-CSVP : 서보모터 확장 Interface입니다. 직접 땜질도 가능했으나 저가에 매료되어 지른 보드입니다.
(Logitec) Quick Cam Pro 4000 : EZ-X5와 연결된 사례가 많은 대표적인 Cam입니다.
그외 자질구리한 자재들이 많습니다만 대표적인 자재들만 기재하겠습니다.
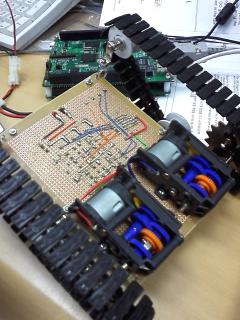
최초 DC모터 구동부를 제작해 보겠노라고 릴레이를 이용하여 구성한 회로입니다.
7.2V RC모델에서 자주사용하는 전원 소스를 레귤레이터를 이용하여 5V 하강 이후 회로를 구성했는데요..
1~2회 정도는 입력 데이터에 맞게 움직이지만 필요 전류가 레귤레이터에 누적되는지
열만 엄청나게 나면서 삐리삐리 해져 버리네요.. 결국 포기하고 DC모터 드라이버 구입 결정!

원래는 PWM도 EZ-X5에서 생성하려 했으나.. 디바이스 드라이버 몇번 만져보다 결국 포기..
atmega128 구입해 버렸습니다. (ㅜㅜ.. 자금 압박이 엄청 심했는데 주말 알바 빡시게 해서 간신히 구입!)
나중에 알고 보니까 arm target board 제조사에 요청하면 PWM관련 디바이스 드라이버 제공을 해준다네요..(내돈..ㅠㅠ)
http://serviceapi.nmv.naver.com/flash/NFPlayer.swf?vid=1C8B3D97CC99227F746D5B93DBD27DB71B28&outKey=V12220faaebc6c06827c6b202a5a8dc72336cb7e05025fcc8e4ecb202a5a8dc72336c
구매 후의 테스트는 필수!
간단한 서보모터 구동 프로그램을 올려 서보모터 테스트를 했습니다.
아직까지는 순조롭습니다.
외관 뼈대 구성을 할 포맥스와 접착제 입니다.
접착제 주사 용기가 무언가를 떠올리게 만드네요..
제방에 다녀가셨던 부모님께서 몇번 시껍하셨습니다.
구매는 X션에서 중계로 구입을 했습니다.
판매자 아저씨가 상당히 친절하셔서 수치 및 수량 선택에 많은 도움을 주셨습니다.^^;
너저분한 제 방과 외관이 제작되길 기다리는 주요 부품들 입니다.
정말 돼지 우리가 따로 없네요..ㅠㅠ
CAD를 잘 못써서 외관 설계를 직접 손으로 해야 했습니다..
덕분에 한 부위 제작에 붙이고 뜯고를 수십번 반복..ㅠㅠ
DC모터를 고정할 하체 제작 과정입니다.
포맥스가 제단이 쉽고 견고하기까지 하다고 말로만 들었던 사실을 실감하는 순간이었습니다.
포맥스 접착제로 접합이 된곳은 원래 그 모양 이었던 것 처럼 붙습니다.
앞으로 애용해야 겠네요 ㅋ;
하체가 완성된 모습입니다.
보이는 기어박스와 모터는 타미야 제품으로 프라모델 판매점에서 구입한 건데요..
구성 기어비를 5가지 종류로 변형이 가능하며 모터는 3.3V~5.5V까지 허용됩니다.
단점은!!
토크 표시 단위가 mN/M로 되어있어 한눈에 알기가 어렵습니다..ㅜㅜ
(이후 문제가 발생합니다.ㅠㅠ 역시 치밀한 계획 아래에서 시작했어야 했는데..ㅠㅠ)
2층및 3층 구성입니다.
돈 아끼려고 지지대를 쇠로 구입했는데요..(얼마 차이도 안나는데..ㅠㅠ)
은근히 누적되는 무게가 슬금슬금 압박이 옵니다..
2층은 EZ-X5와 DC Motor Driver가 올라가 있고
3층은 Atmega128과 Servo Motor Interface가 올라가 있습니다.
http://serviceapi.nmv.naver.com/flash/NFPlayer.swf?vid=B3B81F54A027C892D348D3B32D2F617EC61B&outKey=V1297776fec50a259d597e5d542e2fbcb327d63ae4cecc35294aee5d542e2fbcb327d
여기까지의 중간 테스트!
DC Motor Driver가 PWM을 받을수 있도록 제작되어 있는것을 확인하고
속도 제어까지 추가한 소스를 올려 테스트한 영상입니다.
..
모터가 조금 불안합니다.
상대적으로 조금만 0값이 많은 PWM을 받을때는
거의 움직이지 못하는 것을 확인하게 되었습니다.
12V소스 하나만을 이용하기에 5V가 필요할때는
Atmega128 보드 내부의 레귤레이터를 거쳐 나오는 전원을 이용 했는데요..
손으로 온도를 측정한 결과,
손 데일뻔 했습니다..;;; 열이 엄청나네요..
뭔가 대처 방법이 필요한데.. 우선은 외관 형태부터 잡는게 우선이기에 더 진행을 하기로 했습니다.
머리통 까지 제작 완료 후 4층을 올린 모습입니다.
가능하면 나중을 위해 캠은 원형 그대로 올리려 했습니다만..
머리통 사이즈가 아무리 봐도 답이 안나와서
캠을 분해하여 붙였습니다.
덕분에 머리통 탈부착 시에는 조심조심...
http://serviceapi.nmv.naver.com/flash/NFPlayer.swf?vid=CD22B28F31622AFFFD7224C7409385461534&outKey=V122e0d19f644c5f849e6d5359207375518177327045634af0122d535920737551817
현재까지의 구현 외관 테스트 입니다.
아직까지는 MCU가 포함된 보드들 간의 통신은 구현하지 않았기에
atmega128 보드상에서 움직임 패턴을 구현한 움직임입니다.
뭐.. DC모터가 조금 불안한것 빼고는 나름 만족스럽습니다.
팔을 구현할 것이기에 서보 모터를 6개 추가 구매 하였습니다.
중고임에도 모든 구성품의 상태 A급!!
대만족!
본격적으로 팔 구현에 돌입하는데요..
자금 사정상 서보모터를 더 구입할수 있는 여력은 안돼고..
가능한 자유로은 팔 관절을 위해 한쪽 팔만 구현하기로 결정합니다.
그러나..
로봇용 높은 토크의 서보모터를 괜히 쓰는게 아니더군요..
여기까지 제작후 어깨를 한번 달아 봤는데
어깨를 들어올리기는 고사하고 높이 유지조차도 불가능한 상태..
결국 어깨쪽의 관절 하나를 포기하고 손을 만들어 추가한 모습입니다.
애초에 원했던 모형의 관절이 나오진 않았습니다만
머리 시선을 컨트롤 하여 불편한 팔을 보완하려는 꿈도 잠시..
손에 들어가는 서보 모터 무게를 계산을 안했습니다..
역시 이전의 팔모양과 동일한 현상 발생..
무거워서 들어 올리질 못하네요..
결국 현재 모양도 포기.. 새로운 팔구조를 구상하게 됩니다.
팔 모양 변경을 위해 다 뜯고 해체한 당시 모습..
환상이네요..
당시 제 상황을 말해주던 담배곽과 뜨겁게 달궈지는 레귤레이터를 식히기 위한 쿨러의 모습도 보입니다..
서보 1개로 못들어 올리면 2개로 들어 올리는거다!!
다행히 제어가 됩니다!!
약간은 힘이 불안불안 하지만 나름 만족스러운 결과물 입니다.
손 끝은 양쪽 팔 끝에 서보모터 1개씩을 추가
양 손을 이용한 집게 형태의 손과 팔이 나왔습니다.
(해당 팔 모양 구상하는데 만하루 걸렸습니다. ㅠㅠ)
팔 구현을 마치고 이곳 저곳 테스트를 하던중..
또 다른 문제가 발생했습니다.
불안 불안 하던 DC모터가 결국 본체를 움직이지를 못하는 현상이!!
쇠재질 지지대와 온갖 보드들, 팔과 머리까지 추가된 현재 무게가
약 3Kg 조금 넘어가는듯 합니다.
(역시 초보라.. 한번에 계산되고 구현되는것이 없습니다. ㅠㅠ)
DC Motor를 12V에 6Kg토크 모터로 교체를 결정합니다.
택배 기다리는 시간도 아까워 시흥 물류센터에 직접 찾아가 구매하고
돌아오는 길에 한컷..
7500rpm모터에 1:120 기어비.. 62.5rpm에 6kg토크..
교체후 테스트 결과는 아주 만족스럽습니다.
최종 외관입니다.
불안한 팔 움직임을 보완하기 위해 어깨 뽕을 달았습니다.
제어부 앞과 뒤의 무게가 비슷할수록 작은힘으로 제어가 가능한 엘레베이터 원리를 이용했습니다.
덕분에 외관은 형편없어져 버리긴 했지만 ㅠㅠ
그래도 나름 외관 완성에 의의를 두며 내부 프로그래밍에 들어갑니다.
EZ-X5의 크로스 컴파일 환경이 별로 편하지 못합니다.
VM-ware에서 띄우는 Linux(Ubuntu 9.1)와 EZ-X5간에
매 디버깅 마다 파일 전송을 통한 영상 확인을 해야 했습니다.
화면으로 표현이 불가능 하지만 Target board간의 시리얼 통신에도 문제가 있어
정말 말도 못할 고생을 해야 했습니다. ㅠㅠ
예전에 잠깐 카이스트 주최 SOC 로봇워 경기중 탱크 로봇 예선 심사를 잠깐 받아본 경험이 있어서
영상 처리중 붉은색 물체 잡아내는 작업은 어렵지 않게 할수 있었습니다.
(데스크 탑에서는 대비 강화 필터나, 색의 값 분포를 일정하게 해주는 히스토그램 평활화 필터를 적용 했었는데
400Mh MCU로 필터 적용까지는 무리였습니다. 320x240사이즈에 depth 3(RGB) 소스를 가지고 오는데
한 프레임 처리 속도가 필터 하나당 1초가 넘어가네요 ㅠㅠ 이런 말도안돼는!!
결국 RGB 노멀라이징 하나만을 이용하여 색의 값을 가져옵니다.
r = r / (r + g + b)
g = g / (r + g + b)
b = b / (r + g + b)
잡음 처리 필터 역시 적용하기 무리가 있기에 강한 빨간색만 인식하기 위하여
r > 0.43 의 조건을 전제로 색을 인식합니다)
로봇에게 명령을 내릴수 있는 입력 센서가 영상 밖에 없기에
일종의 패턴 카드를 만들었습니다.
영상에서 패턴 카드 모양을 확인 할수 있는데
붉은색 Object를 찾으면 그 중심점을 찾아 내고
중심점으로 부터 위, 아래, 왼쪽, 오른쪽 으로 진행하며 붉은 픽셀 추적을 합니다.
최초에 만나는 붉은 픽셀의 거리를 기준으로 패턴 카드를 인식하는
비교적 쉬운 알고리즘을 구현 했습니다.
결과적으로 구현된 기능을 영상으로 올려봅니다.
1. 시선 추적
http://serviceapi.nmv.naver.com/flash/NFPlayer.swf?vid=85818FE259BF02213F5637D0B8E01285575A&outKey=V1255754027cfc8b8621c6923b7927c4202b63065231b467678b36923b7927c4202b6
패턴 카드 1번 입니다. 원래는 좀더 작은 Object를 사용하여 추적을 했었는데
패턴카드를 Object 대신에 사용 하다보니 크기가 너무 커서 조금 불안한 모습입니다.
2. 이동 추적
http://serviceapi.nmv.naver.com/flash/NFPlayer.swf?vid=DE48A488D6BC966BFF3B7291DA68DEF60779&outKey=V126e0edd0a111f30996b7f0cccd89c1657bbe596a1fbe07fae547f0cccd89c1657bb
패턴 카드 2번 (1번을 90\\\\\\\' 회전시킨 모양)
역시 1번과 동일하게 패턴카드가 커서 약간 불안한 모습입니다;;
3. 물건 집기
http://serviceapi.nmv.naver.com/flash/NFPlayer.swf?vid=2D409EAE8D2F945490FD4E2FE839226C573E&outKey=V126dbe6001d330aabd179fbac37c07f8cbb8eceeae93277841839fbac37c07f8cbb8
패턴카드 3번 (1번 180\\\\\\\' 회전한 모양)
마지막에 제 발에 끼어서 물건을 못 들어 올리는게 찍혔네요 ㅠㅠ
4. 빨개 개기
http://serviceapi.nmv.naver.com/flash/NFPlayer.swf?vid=FDD89D11D486C2F6F6A0D96732A009E527A9&outKey=V12804688ff06d025df26928155487839090e941e4fc14743273d928155487839090e
이건 패턴 카드중에 시나리오 모드로 들어갔을때 입니다.
바닥에 라인을 따라다니며 라인 패턴(라인 왼쪽의 짧은 점) 확인시에 주변의 패턴카드를 인식하고
패턴카드를 뒤집고 이후 빨래가 있는 위치까지 이동후에 빨래를 개는 시나리오 인데
현재 추가 패턴카드 지지대가 부러져 버려서
빨래를 개는 모습만 찍었습니다.
5. 서비스~
http://serviceapi.nmv.naver.com/flash/NFPlayer.swf?vid=29D3103CABDF88900650A1F9C4B3F1CB3996&outKey=V127bfeba50aef8e57598c6c8bcbd22996d1d150311a783a6c401c6c8bcbd22996d1d
패턴 카드를 인식하지 못했을때의 행동입니다.
주변 환경의 빛의 세기에 따라 패턴카드가 인식이 잘될때도 있고 안될때도 있는데요..
주변이 조금 어둡다 보니 수차례를 카드를 쥐어줘도 인식을 못하네요..ㅠㅠ
라인 트레이싱 모드도 있으나 현재 촬영된 영상이 없어서 올리지 못하는게 아쉽습니다.
(솔직히 삑사리가 좀 잦아서 제대로 된 영상이 없습니다. ㅠㅠ
로봇 손으로 빛을 가려 그림자가 지는 부분을 읽어 이동하도록 움직임을 구현했는데
조금이라도 빛이 비스듬하게 들어와 손으로 가린 부분의 선을 비추면 선 인식 값이 달라 지네요..
선 인식을 절대값으로 주어준 결과 입니다. 차후 상대값으로 인식하도록 수정 계획중입니다.)
본 프로젝트를 진행하면서 진짜 많은걸 배웠습니다.
본래 지향했던 전공은 Windows App로 뭐 게임이나 영상 관련으로 공부를 해왔었는데요..
3학년 2학기때 임베디드 관련 과목을 수강하며 관심을 가져 4학년때 관심 분야를 급 전향하게 되었습니다.
소프트 웨어의 경우 1 = 1 이라는 공식이 반드시 성립하지만 하드웨어는 이 공식이 맞지 않는 경우도 있네요 ㅡㅡ;;;
어제까지 잘 되던게 오늘와서 안되고..
크로스 컴파일 환경 구축한번하는데 3~4일씩 걸리는데 컴퓨터 포맷 사유 및 작업 장소 변경등으로
환경 구축만 총 3~4 번은 했습니다. (ㅠㅠ 진짜 환경 구축이 아주 곤욕이더라구요..ㅠㅠ)
가장 문제가 됐었던 에피소드중 하나로 타겟 보드간의 시리얼 통신을 들수 있는데요..
보드1 <-> PC 시리얼 통신 이상무
보드2 <-> PC 시리얼 통신 이상무
보드1 <-> 보드2 경우면 값이 아주 희안하게 들어갑니다.
케이블 tx, rx선 꼬아준것도 잊지 않았고 셋팅 역시 10번도 더 확인을 해봤습니다만 이상이 없었고
더 환장하는건 전달되는 값이 일정하게 들어간다는겁니다.
아스키코드 홀수번대는 일정 값부터 일정 차로 균등하게 값이 변동되구요
(틀린값으로 1 -> 0x67 3 -> 0x66 5 -> 0x65)
아스키코드 짝수번대는 사방 팔방으로 튑니다.
(틀린값으로 0 -> 0xec 2 -> 0xda 4 -> 0x8f)
연속된 값일 경우 짝수 사용시에 이후 뒤에 들어오는 값은 전부 잘라먹구요
(S131256 전송시에 S1312까지만 전송됨)
결국 홀수 번대만 사용해서 메세지 맵을 새로 만들었습니다.
(ex. 0 전송을 원할시 0x66 + 0x67(31) 1전송을 원할시 0x66 + 0x66(11) 나머지 수치도 응용해서..)
정말 비효율적인 방법이지만 어찌어찌 해결은 봤습니다.
글을 쓰다 보니 본문에 불필요한 글들이 많이 섞여버렸네요 ㅠㅠ 죄송합니다.
이후 좀더 보완된 모습으로 찾아뵙길 약속 드리며 마치겠습니다.
읽어 주셔서 감사합니다.
ps. FALINUX 장길석님 이동수님, NewTC Q&A 게시판 담당자님, 당근 AVR 많은 분들께 다시한번 감사드립니다.
올려 놓았던 동영상이 링크가 안돼네요 ㅠㅠ 동영상 링크좀 도와주실분 부탁합니다 굽신 ㅠㅠ








댓글 영역
획득법
① NFT 발행
작성한 게시물을 NFT로 발행하면 일주일 동안 사용할 수 있습니다. (최초 1회)
② NFT 구매
다른 이용자의 NFT를 구매하면 한 달 동안 사용할 수 있습니다. (구매 시마다 갱신)
사용법
디시콘에서지갑연결시 바로 사용 가능합니다.